Single trap#
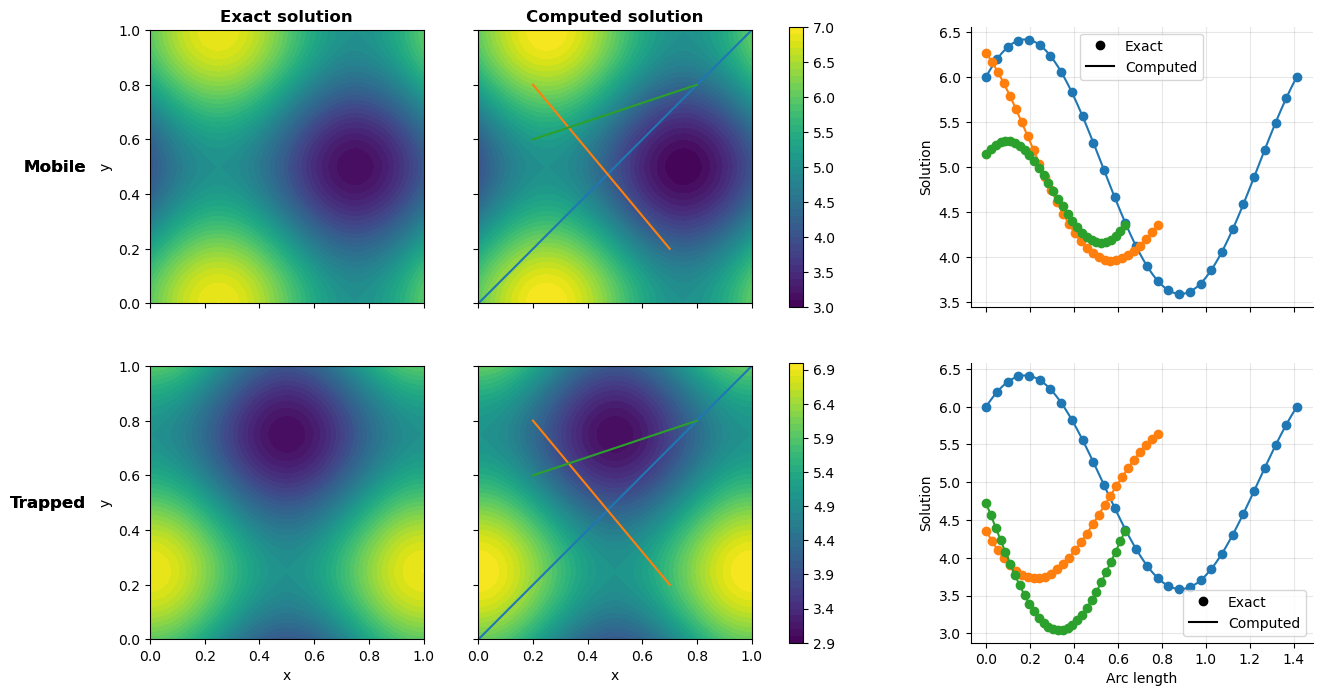
The MMS case verifies the implementation of trapping in FESTIM. Only one trap is considered for simplicity, but the same principle applies for more traps. Exact solutions are defined for both the mobile concentration and the trapped concentration.
(18)#\[\begin{align}
c_\mathrm{m, exact} &= 5 + \sin{\left(2 \pi x \right)} + \cos{\left(2 \pi y \right)} \\
c_\mathrm{t, exact} &= 5 + \cos{\left(2 \pi x \right)} + \sin{\left(2 \pi y \right)}
\end{align}\]
The trap density is \(n = 2 \ c_\mathrm{t,exact} \), the trapping rate is \(k = 0.1\), the detrapping rate is \(p = 0.2\), and the diffusivity is \(D=5\). MMS sources are obtained for both the mobile concentration and the trapped concentration:
(19)#\[\begin{align}
S_\mathrm{m} &= -D \nabla^2 c_\mathrm{m, exact} + k c_\mathrm{m, exact} (n - c_\mathrm{t, exact}) - p c_\mathrm{t, exact} \\
S_\mathrm{t} &= - k c_\mathrm{m, exact} (n - c_\mathrm{t, exact}) + p c_\mathrm{t, exact}
\end{align}\]
Again, the computed solution agrees very well with the exact solution.
FESTIM code#
Show code cell source
import festim as F
import sympy as sp
import fenics as f
import matplotlib as mpl
import matplotlib.pyplot as plt
import numpy as np
# Create and mark the mesh
fenics_mesh = f.UnitSquareMesh(100, 100)
left_surface = f.CompiledSubDomain("near(x[0], 0.0)")
right_surface = f.CompiledSubDomain("near(x[0], 1.0)")
top_surface = f.CompiledSubDomain("near(x[1], 1.0)")
bottom_surface = f.CompiledSubDomain("near(x[1], 0.0)")
volume_markers = f.MeshFunction("size_t", fenics_mesh, fenics_mesh.topology().dim())
volume_markers.set_all(1)
surface_markers = f.MeshFunction(
"size_t", fenics_mesh, fenics_mesh.topology().dim() - 1
)
surface_markers.set_all(0)
left_surface.mark(surface_markers, 1)
top_surface.mark(surface_markers, 2)
right_surface.mark(surface_markers, 3)
bottom_surface.mark(surface_markers, 4)
# Create the FESTIM model
my_model = F.Simulation()
my_model.mesh = F.Mesh(
fenics_mesh, volume_markers=volume_markers, surface_markers=surface_markers
)
# Variational formulation
x = F.x
y = F.y
exact_solution_mobile = (
5 + sp.sin(2 * sp.pi * (x)) + sp.cos(2 * sp.pi * y)
) # exact solution
exact_solution_trapped = (
5 + sp.cos(2 * sp.pi * (x)) + sp.sin(2 * sp.pi * y)
) # exact solution
def grad(u):
"""Computes the gradient of a function u.
Args:
u (sympy.Expr): a sympy function
Returns:
sympy.Matrix: the gradient of u
"""
return sp.Matrix([sp.diff(u, x), sp.diff(u, y)])
def div(u):
"""Computes the divergence of a vector field u.
Args:
u (sympy.Matrix): a sympy vector field
Returns:
sympy.Expr: the divergence of u
"""
return sp.diff(u[0], x) + sp.diff(u[1], y)
my_model.T = F.Temperature(value=500)
my_mat = F.Material(id=1, D_0=5, E_D=0)
my_model.materials = my_mat
density = 2 * exact_solution_trapped
my_trap = F.Trap(
id=1,
k_0=0.1,
E_k=0,
p_0=0.2,
E_p=0,
density=density,
materials=my_model.materials[0],
)
my_model.traps = [my_trap]
# source term left
k = my_trap.k_0 * sp.exp(-my_trap.E_k / my_model.T.value)
p = my_trap.p_0 * sp.exp(-my_trap.E_p / my_model.T.value)
D = my_mat.D_0 * sp.exp(-my_mat.E_D / my_model.T.value)
f_mobile = (
-div(D * grad(exact_solution_mobile))
+ k * exact_solution_mobile * (density - exact_solution_trapped)
- p * exact_solution_trapped
)
f_trap = (
-k * exact_solution_mobile * (density - exact_solution_trapped)
+ p * exact_solution_trapped
)
print(
f"Source term left: {sp.latex(f_mobile.simplify().subs('x[0]', 'x').subs('x[1]', 'y'))}"
)
print(
f"Source term right: {sp.latex(f_trap.simplify().subs('x[0]', 'x').subs('x[1]', 'y'))}"
)
my_model.sources = [
F.Source(f_mobile, volume=1, field="0"),
F.Source(f_trap, volume=1, field="1"),
]
my_model.boundary_conditions = [
F.DirichletBC(surfaces=[1, 2, 3, 4], value=exact_solution_mobile, field="solute"),
F.DirichletBC(surfaces=[1, 2, 3, 4], value=exact_solution_trapped, field=1),
]
my_model.settings = F.Settings(
absolute_tolerance=1e-10,
relative_tolerance=1e-10,
transient=False,
)
my_model.initialise()
my_model.run()
Show code cell output
Source term left: \left(0.1 \sin{\left(2 \pi x \right)} + 0.1 \cos{\left(2 \pi y \right)} + 0.5\right) \left(\sin{\left(2 \pi y \right)} + \cos{\left(2 \pi x \right)} + 5\right) + 20 \pi^{2} \sin{\left(2 \pi x \right)} - 0.2 \sin{\left(2 \pi y \right)} - 0.2 \cos{\left(2 \pi x \right)} + 20 \pi^{2} \cos{\left(2 \pi y \right)} - 1.0
Source term right: - \left(0.1 \sin{\left(2 \pi x \right)} + 0.1 \cos{\left(2 \pi y \right)} + 0.5\right) \left(\sin{\left(2 \pi y \right)} + \cos{\left(2 \pi x \right)} + 5\right) + 0.2 \sin{\left(2 \pi y \right)} + 0.2 \cos{\left(2 \pi x \right)} + 1.0
Calling FFC just-in-time (JIT) compiler, this may take some time.
Defining initial values
Defining variational problem
Defining source terms
Defining boundary conditions
Solving steady state problem...
Calling FFC just-in-time (JIT) compiler, this may take some time.
Calling FFC just-in-time (JIT) compiler, this may take some time.
Calling FFC just-in-time (JIT) compiler, this may take some time.
Solved problem in 2.30 s
Comparison with exact solution#
Show code cell source
# export exact solution
exact_solution_mobile = f.Expression(sp.printing.ccode(exact_solution_mobile), degree=2)
exact_solution_trapped = f.Expression(
sp.printing.ccode(exact_solution_trapped), degree=2
)
V = f.FunctionSpace(my_model.mesh.mesh, "CG", 1)
exact_solution_mobile = f.project(exact_solution_mobile, V)
exact_solution_trapped = f.project(exact_solution_trapped, V)
computed_solution_mobile = my_model.h_transport_problem.mobile.post_processing_solution
E = f.errornorm(computed_solution_mobile, exact_solution_mobile, "L2")
print(f"L2 error mobile: {E:.2e}")
computed_solution_trap = my_trap.post_processing_solution
E = f.errornorm(computed_solution_trap, exact_solution_trapped, "L2")
print(f"L2 error trap: {E:.2e}")
# plot exact solution and computed solution
fig, (axs_top, axs_bot) = plt.subplots(2, 3, figsize=(15, 8), sharex="col")
plt.sca(axs_top[0])
plt.title("Exact solution", weight="bold")
CS1 = f.plot(exact_solution_mobile)
plt.sca(axs_top[1])
plt.title("Computed solution", weight="bold")
CS2 = f.plot(computed_solution_mobile)
plt.colorbar(CS2, ax=[axs_top[0], axs_top[1]], shrink=1)
plt.sca(axs_bot[0])
CS3 = f.plot(exact_solution_trapped)
plt.sca(axs_bot[1])
CS4 = f.plot(computed_solution_trap)
plt.colorbar(CS4, ax=[axs_bot[0], axs_bot[1]], shrink=1)
for CS in [CS1, CS2, CS3, CS4]:
CS.set_edgecolor("face")
pad = 5 # in points
row_labels = ["Mobile", "Trapped"]
for ax, row in zip([axs_top[0], axs_bot[0]], row_labels):
ax.annotate(
row,
xy=(0, 0.5),
xytext=(-ax.yaxis.labelpad - pad, 0),
xycoords=ax.yaxis.label,
textcoords="offset points",
size="large",
ha="right",
va="center",
weight="bold",
)
axs_top[0].set_ylabel("y")
axs_bot[0].set_ylabel("y")
axs_bot[0].set_xlabel("x")
axs_bot[1].set_xlabel("x")
axs_top[0].sharey(axs_top[1])
plt.setp(axs_top[1].get_yticklabels(), visible=False)
axs_bot[0].sharey(axs_bot[1])
plt.setp(axs_bot[1].get_yticklabels(), visible=False)
def compute_arc_length(xs, ys):
"""Computes the arc length of x,y points based
on x and y arrays
"""
points = np.vstack((xs, ys)).T
distance = np.linalg.norm(points[1:] - points[:-1], axis=1)
arc_length = np.insert(np.cumsum(distance), 0, [0.0])
return arc_length
# define the profiles
profiles = [
{"start": (0.0, 0.0), "end": (1.0, 1.0)},
{"start": (0.2, 0.8), "end": (0.7, 0.2)},
{"start": (0.2, 0.6), "end": (0.8, 0.8)},
]
# plot the exact solution and the profile lines on the left subplot
for axs, exact, computed in zip(
[axs_top, axs_bot],
[exact_solution_mobile, exact_solution_trapped],
[
computed_solution_mobile,
computed_solution_trap,
],
):
# plot the profiles on the right subplot
for i, profile in enumerate(profiles):
start_x, start_y = profile["start"]
end_x, end_y = profile["end"]
plt.sca(axs[1])
(l,) = plt.plot([start_x, end_x], [start_y, end_y])
plt.sca(axs[2])
points_x_exact = np.linspace(start_x, end_x, num=30)
points_y_exact = np.linspace(start_y, end_y, num=30)
arc_length_exact = compute_arc_length(points_x_exact, points_y_exact)
u_values = [exact(x, y) for x, y in zip(points_x_exact, points_y_exact)]
points_x = np.linspace(start_x, end_x, num=100)
points_y = np.linspace(start_y, end_y, num=100)
arc_lengths = compute_arc_length(points_x, points_y)
computed_values = [computed(x, y) for x, y in zip(points_x, points_y)]
(exact_line,) = plt.plot(
arc_length_exact,
u_values,
color=l.get_color(),
marker="o",
linestyle="None",
)
(computed_line,) = plt.plot(arc_lengths, computed_values, color=l.get_color())
plt.sca(axs[2])
plt.ylabel("Solution")
legend_marker = mpl.lines.Line2D(
[],
[],
color="black",
marker=exact_line.get_marker(),
linestyle="None",
label="Exact",
)
legend_line = mpl.lines.Line2D([], [], color="black", label="Computed")
plt.legend(
[legend_marker, legend_line],
[legend_marker.get_label(), legend_line.get_label()],
)
plt.grid(alpha=0.3)
plt.gca().spines[["right", "top"]].set_visible(False)
axs_bot[-1].set_xlabel("Arc length")
pad = 5 # in points
row_labels = ["Mobile", "Trapped"]
for ax, row in zip([axs_top[0], axs_bot[0]], row_labels):
ax.annotate(
row,
xy=(0, 0.5),
xytext=(-ax.yaxis.labelpad - pad, 0),
xycoords=ax.yaxis.label,
textcoords="offset points",
size="large",
ha="right",
va="center",
weight="bold",
)
plt.show()
L2 error mobile: 3.29e-04
L2 error trap: 2.57e-04